
(주)휴로틱스
Physical AI 데이터 아키텍트 및 MLOps 엔지니어
누적 투자 80억↑
1-50명
유연근무제
음료/간식 제공
저녁 제공
- 공고소개
- 주요업무
- 자격요건
- 우대사항
- 채용절차
- 기타안내
**우리는 초고속 성장 중인 웨어러블 로봇 스타트업, 휴로틱스입니다.**
🚀 압도적인 기술력과 성장성
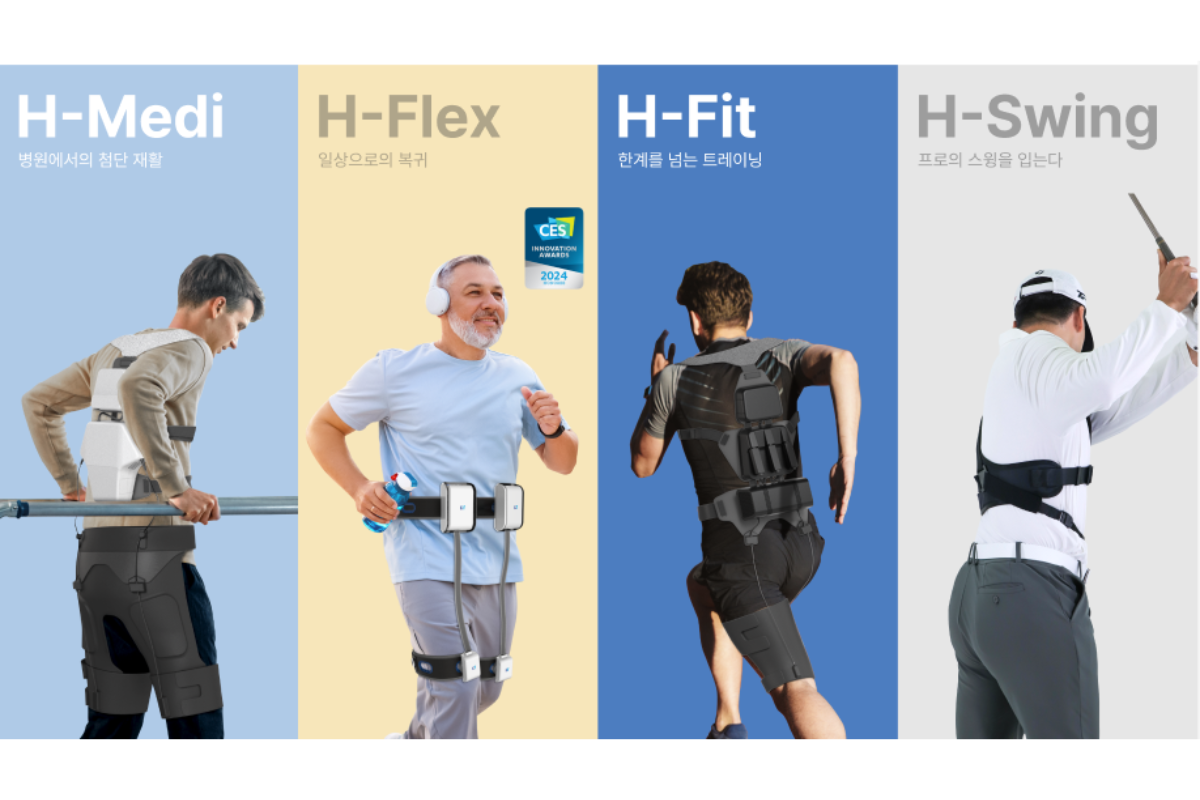
- CES 혁신상 3년 연속 수상으로 입증된 세계적 기술력
- pre-A 누적 투자 88억 원 유치, 설립 4년 만의 초고속 성장
- 제품 출시와 함께 다음 단계를 향한 스케일업 진행 중
🤖 Human + Robotics = HUROTICS사람을 돕는 로봇으로, 삶의 한계를 넘어섭니다.
- 삶의 질 향상 : 보행·재활 지원부터 일상 보조, 스포츠 퍼포먼스까지 아우르는 착용형 로봇
- 사람 중심 혁신 : 착용성, 지능형 보조 제어, 현장 검증 기반의 빠른 제품화
함께 미래를 만들어갈 동료를 찾습니다.
휴로틱스는 "누구나 사용할 수 있는 웨어러블 로봇 사회"를 지향합니다.
혁신을 멈추지 않는 우리와 함께, 더 큰 가능성을 현실로 만들 열정적인 동료를 기다립니다.
주요업무
📋 주요 업무 (Responsibilities)
웨어러블 로봇용 Physical AI 모델 연구/개발: 센서 데이터(IMU, Loadcell, Vision 등)를 기반으로 인간-로봇 상호작용(HRI)을 모델링하고, 복잡한 보행 환경에서의 적응형 제어 알고리즘을 개발합니다.
실시간 보행 의도 파악 및 예측: 온디바이스 AI(On-device AI) 환경에서 저지연(Low-latency)으로 사용자의 다음 동작을 예측하는 딥러닝/머신러닝 모델을 설계합니다.
Bio-mechanical 시뮬레이션 및 최적화: 인체 동역학 모델과 로봇 제어 모델을 결합하여, 착용자의 대사 효율(Metabolic cost)을 최소화하는 최적 보조 프로파일을 생성합니다.
데이터 기반 강화학습(Reinforcement Learning): 시뮬레이션 및 실제 보행 데이터를 활용하여, 다양한 체형과 보행 패턴에 대응하는 범용적 제어 정책(Control Policy)을 학습시키고 검증합니다.
자격 요건
✅ 자격 요건 (Qualifications)
학력: 로보틱스, 컴퓨터공학, 기계공학, 의공학 등 관련 분야 석사 또는 박사 학위 소지자.
기술 스택:
Git, Docker 등을 활용한 협업 및 버전 관리 시스템 구축 경험
Python, C/C++ 기반의 알고리즘 구현 능력.
PyTorch, TensorFlow 등 딥러닝 프레임워크 숙련도.
Robot Dynamics(Kinematics, Force Control) 및 제어 이론에 대한 깊은 이해.
경험:
실제 물리 시스템(Physical System)에 AI 모델을 배포하고 최적화해 본 경험.
시계열 데이터(Sensor Fusion) 처리 및 상태 추정(State Estimation) 경험.
우대사항
🌟 우대 사항 (Preferred Qualifications)
WandB, MLflow 등 실험 관리 툴(Experiment Tracking) 도입 경험자
웨어러블 로봇 또는 보행 보조 기기 연구/개발 경험자.
Reinforcement Learning (Sim-to-Real) 프로젝트 수행 경험.
컴퓨터 비전 기술을 활용한 환경 인식 및 보행 경로 예측 연구 경험.
Top-tier 학회(ICRA, IROS, RSS, CVPR 등) 논문 게재 실적 보유자.
실시간 OS(RTOS) 또는 임베디드 환경에서의 모델 경량화 경험.
채용절차
면접 > 인성검사 > 면접 > 최종합격
기타안내
[혜택 및 복지]
• 자율출퇴근제(08~10시 출근, 17~19시 퇴근)
• 자유로운 연차 사용, 자율 복장
• 급여제도 (4대보험, 성과금, 퇴직금)
• 음료 및 간식 제공
• 개인 PC 고사양 지원
[지원 시 주의사항]
• 3개월 수습 기간 (수습기간 동일 급여와 복리후생 보장 3개월 후 정규직)
• 포트폴리오 필수 제출
[참고사항]
• 서류 합격자 별도 연락 드립니다.
• 본 채용은 수시 진행으로 우수 인재 채용시 마감될 수 있습니다.
이 포지션에 필요한 전문분야/기술
Python
C/C++
PyTorch
TensorFlow
IMU

(주)휴로틱스
정보 보기
누적 투자 금액
88억원 이상
투자사
아주아이비투자, 원익투자파트너스, 신용보증기금, 팁스(TIPS), 미래과학기술지주
리멤버에서 수집한 기업 정보입니다.
정보 수정이 필요할 경우, 아래 경로로 요청해 주세요.
리멤버 앱 > 더보기 > 1:1 문의
먼저 입사한 실무자에게 조언을 구해보세요
로그인하고 현직자에게 궁금한 점을 물어보세요
사용자가 커넥트에 입력한 정보를 기반으로 제공됩니다
(주)휴로틱스
Physical AI 데이터 아키텍트 및 MLOps 엔지니어
누적 투자 80억↑
1-50명
유연근무제
음료/간식 제공
저녁 제공
직급/직책기타
연봉1억 원~
근무지서울특별시 동작구
경력경력 무관
학력석사 이상
마감일
채용 시 마감
이 공고를
주변에도 알려주세요
주변에도 알려주세요